Precio
$ 150
Disponible
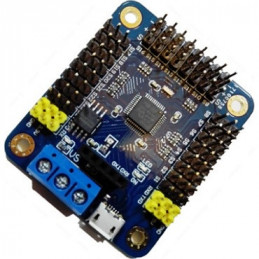
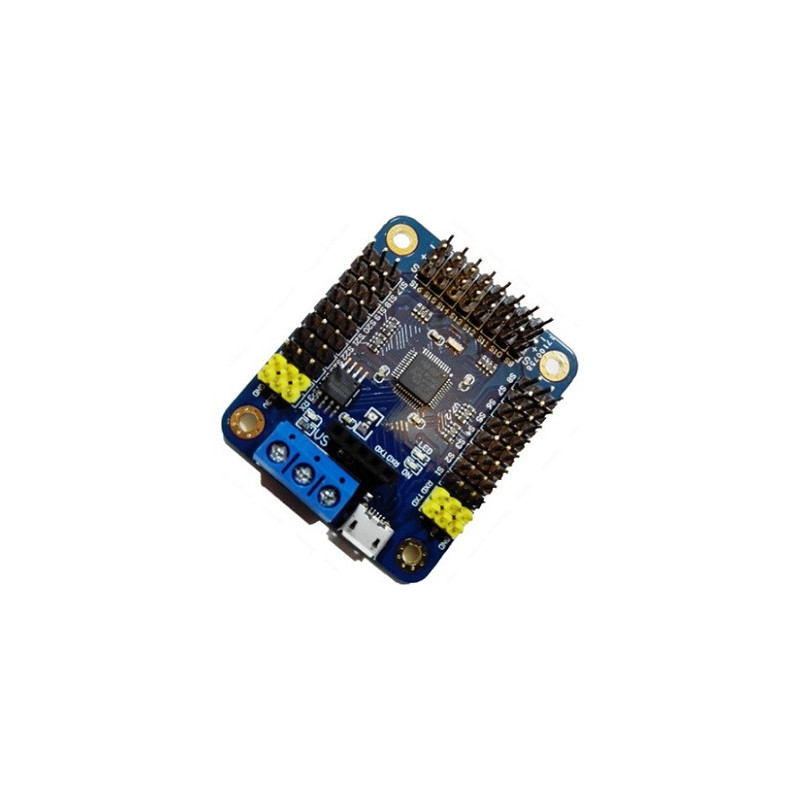
El uso del tablero de control del engranaje de dirección (toda la información sobre esto) Http:/dl.torobot.com/down/USC16.zip Características exclusivas: 1.- el uso de CPU de alta velocidad de 32 bits, procesamiento más rápido, control más preciso, un funcionamiento más estable. 2.- no puedes programar, pero mientras uses tu ratón, tu robot seguirá bailando. 3.- la función perfecta de funcionamiento apagado, no el microcontrolador externo, no conecte la PC, puedes hacer miles de instrucciones de acción. 4.- identificación automática de la tasa de baud (9600,19200, 38400,57600, 115200,128000 identificación automática). 5.- la operación real fuera de línea (por ejemplo, enviar "# habilitar #1g #3G #4 #5g #6g #7GC100 " con un regreso de transporte, el controlador de dirección se ejecuta automáticamente después de los primeros 1,3, 4,5, 6, 7 grupos de Acción, el ciclo de la implementación de 100 veces, rendimiento estable, Añadir 500 Grupo de Acción tampoco es problema. 6.- puerto serie USB y TTL usando un puerto de lo que se refiere, absolutamente ninguna interferencia. 7.- el Grupo de Acción regresará a un "AGF \ r \ n", para que hayamos detectado el Grupo de Acción no ha terminado para realizar otros pedidos. 8.- regresará a un solo comando un "# CC \ r \ n", como Enviar "#2p1500 #3p1500t1000 \ r \ n", el grupo de control después de la aplicación del final, volverá "# CC \ r \ n" significa ejecución es completa. Glosario: ¿Qué es un grupo de acción? Grupo de acción del Grupo de Control de engranajes, es nuestra propia investigación independiente y desarrollo del primero, la función es usar el lado de la PC del software se ha ajustado una serie de gestos envasados en un grupo de acción Y luego se descargó en la Junta de Control de dirección, después del éxito de la descarga, Formaremos un número, como el número 1, si desea implementar este Grupo de Acción, enviar #1gc1 \ r \ n (C1 ese ciclo 1). Glosario: ¿qué está desconectado? Desconectado está fuera de la computadora, single-chip, mientras un panel de control de dirección conectado al poder puede controlar 32 equipos de dirección al mismo tiempo tiempo movimiento. Glosario: ¿cómo funciona un trabajo sin conexión? La operación sin conexión debe ser establecida por adelantado. Abra el lado de la PC del software de la computadora, seleccione el grupo de acción para ser ejecutado offline, y luego seleccione el número de ejecuciones y, a continuación, haga clic en "habilitar", el software final pedirá el éxito, esta vez, puede dejar que el tablero de control de dirección se ajuste (puede desenchufar la potencia del chip, Y luego re-enchufe), el fenómeno salió! Glosario: CPU de 32 bits Muchas de las tablas de control de engranajes de dirección tradicionales se utilizan como CPU de 8 bits baratas como AVR, 51 MCU, velocidad de CPU de 8 bits y rendimiento mucho detrás de la CPU de 32 bits varias veces. Este producto es un conjunto del controlador de motor servo más rentable. Puede controlar hasta 16 Servomotor de acción coordinada al mismo tiempo, con control de posición y control de velocidad, ambos pueden ser usados para controlar el software de la PC, pero también a través del MCU (51, AVR, brazo, FPGA, Pic, etc.) nivel TTL de comunicación UART del puerto serie) Mando para controlar el equipo de dirección, también puede PC software en el código de instrucciones descargado al controlador de motor servo, para lograr la operación sin conexión. A través del PC para operar el software de ordenador anfitrión al controlador para pasar señales de control, puede lograr el control o control de motor multi-Servo al mismo tiempo. También se puede utilizar con un microprocesador de puerto serie como combinación de ordenador de acogida, instrucciones de control para racionalizar, control la precisión de la esquina es alta, la tasa baud se puede cambiar en tiempo real, tamaño pequeño, peso ligero, que se puede utilizar como robot humanoide, robot biónico, el controlador principal del manipulador. La mayor ventaja de este producto es: investigación independiente y desarrollo, control de motor de 16 vías, alta precisión (1us), usted puede controlar la velocidad de rotación del servo motor ha alcanzado multi-servo motor puede ser sincronizado operación, el uso de las importaciones originales de los EE. UU. de CPU de 32 bits, Interfaz integrada de comunicación USB integrada, el uso de los Estados Unidos importó at24c512 sop8 como EEPROM (Flash) para mantener los datos del Grupo de Acción, la alta estabilidad, 16-modo servo motor independiente diseño PIN (no produce fenómeno lleno). El SerieElComenzar(115200);/Establecer la tasa de baud a 115200 SerieElImpresión("#1p800t1000 \ r \ n");Número de dirección a la anchura de pulso de 800 posiciones, el uso de tiempo 1000 ms Retardo(1000);/Retardo 1000 ms, la dirección acaba de terminar en un comando Figura 1 Tecnología de placa de PCB: proceso de inmersión química SMT proceso de soldadura de chip más seguro y más estable Parámetros del producto: 1. Control de la fuente de alimentación del Chip: 6.5 V ~ 12 V o 4.5 V ~ 5.5 V. ¿Por qué hay dos rangos? Porque hay dos entradas(USB puede dar la fuente de alimentación del chip del tablero de control del servo, selección automática, con la protección inversa del USB, usted puede proteger su computadora no se invierte voltaje USB quemado) 2. SERVO parte del rango de suministro de energía: DC (parámetros y parámetros de dirección, uso General de 5 V DC). 3. canal de control: Control 16 al mismo tiempo.(La velocidad del engranaje de dirección es ajustable y el robot se mueve suavemente) 4. Entrada de comunicación: USB o puerto serie (TTL, usart).(El control inalámbrico del controlador de dirección se puede hacer utilizando un módulo Bluetooth inalámbrico u otro módulo inalámbrico) 5. salida de señal: PWM (precisión 1us). 6. Servo Resolución de unidad de motor: 1us, 0.09 grados. 7. Baud rango: 9600 19200 38400 57600 115200 128000.(Identificación completamente automática, no es necesario establecer) 8. apoyar el servomotor: futaba o Hitec y marcas domésticas como huisheng, etc. spike usa el Control de señal PWM del engranaje. 9. PCB tamaño: 51mm × 43.5mm × 1.6mm (Montaje de agujero de montaje: 42*35.5mm). 10. modo de control: USB y serie (TTL) para aceptar el modo de comando.(Con cable de datos USB y software de control de ordenador de host, el software se puede actualizar en cualquier momento) 11. flash: 512 k rom a bordo.(Si cada comando se controla al mismo tiempo 32 dirección, puede guardar más de 500 instrucciones, si la orden es muy corta, guardar miles de preguntas no es un problema) @ Para ahorrar el costo de hacer el disco, ahora la información del producto y el software liberados a Internet, el usuario por favor descargue, Http:/dl.torobot.com/down/USC16.zip